انجام پروژه های حرفه ای مهندسی برق
بیان مقدمه و اهداف پروژه (شناسایی و عیب یابی سیستم با شبکه عصبی)
به منظور شناخت و مدل سازی سیستم های دینامیکی از طریق شناسایی آن ها عمل می شود. شناسایی سیستم ها فرآیندی به منظور بررسی اثر متغیرهای داخلی سیستم (متغیرهای حالت سیستم) و ورودی های خارجی بر روی آن می باشد. از طرفی دیگر هر سیستمی دارای مجموعه ای از عیوب می باشد که می تواند عملکرد صحیح آن را تحت تاثیر قرار دهد. این عیوب همخوانی خروجی و ورودی سیستم شناسایی شده را تغییر می دهد و اصطلاحا باعث بروز باقیمانده در خروجی (نسبت به مقدار مورد انتظار) می شود. شناخت این تاثیرات و باقیمانده ها می تواند منجر به شناسایی عیوب گردد. مبحث شناسایی و عیب یابی سیستم به بررسی این دو مبحث می پردازد.
روش های مختلفی برای شناسایی و عیب یابی سیستم معرفی می شود که از روش های مبتنی بر جعبه سیاه، مدل سازی مرتبه اول و دوم ، روش های شناسایی برمبنای حوزه فرکانسی (روش های بودی) و روش های مبتنی بر روش های هومشند از این جمله می باشند.
هر کدام از روش های مورد نظر به فراخور سیستم مورد مطالعه استفاده می شوند. روش جعبه سیاه به منظور شناسایی و عیب یابی سیستم هایی که داده های ورودی – خروجی مشخص دارند، استفاده می شود. مدل سازی مرتبه اول و دوم برای سیستم ساده با الگوریتم های بررسی شده در مراجع استفاده می شود. روش های هوشمند نیز برای سیستم های پیچیده که خروجی های با توزیع های نرمال دارند بکار می رود.
در این پروژه یک نمونه شیر صنعتی با نام لاتین دامادیک (DAMADIC) به منظور شناسایی و عیب یابی مورد بررسی قرار می گیرد. شیرهای صنعتی دامادیک دارای 19 عیب شناخته شده می باشند که برخی به صورت تک قدرته و برخی با 3 قدرت پایین ، متوسط و بزرگ بر روی سیستم اعمال می شوند. اهداف مورد انتظار در این پروژه در مرحله اول شناسایی سیستم می باشد که توسط شبکه های عصبی انجام می گیرد و در مرحله دوم عیوب سیستم مورد شناسایی قرار می گیرند.
توضیحات کلی
شیر محرک صنعتی دامادیک دارای یک ساختار الکترومکانیکی به صورت شکل زیر می باشد.

ساختار الکترومکانیکی شیر دامادیک
این بخش از شیر در واقع نشان دهنده سیستم محرک آن می باشد که در مهندسی کنترل به عنوان رابط بین بخش کنترل کننده و پلنت می باشد. بر همین اساس ورودی های آن عبارت از ورودی کنترل ، ورودی فشار و دما می باشد. همچنین خروجی های سیستم شامل فلو و جابجایی خروجی شیر (دِبی) می باشد.
به طور مشخص این شیر در نواحی از دما ، فشار ورودی و سیگنال کنترل کار می کند که بنابه اطلاعات مهندسین این شیر سیگنال کنترل همواره در ناحیه بین صفر و یک بوده ، دما تقریبا ثابت و فشار نیز در یک محدوده قرار می گیرد. بنابر این مسئله آنچه در مرحله اول از کار مورد توجه است اعمال تغییرات منطقی بر روی ورودی های سیستم، ثبت خروجی های مورد نظر و نهایتا شناسایی سیستم از روی این داده ها می باشد.

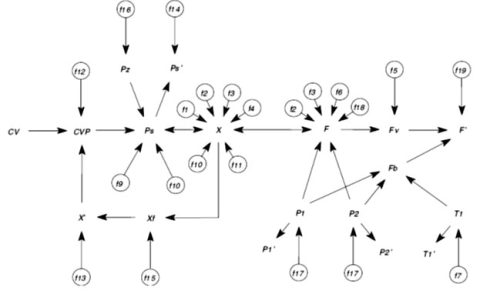
رابط علی – معلولی (بلوک دیاگرام) سیستم محرک شیر صنعتی
بلوک دیاگرام بالا رابطه بین بخش های مختلف شیر را نشان می دهد. که هر کدام با یک تابع تبدیل (نه لزوما کاملا خطی) به هم ارتباط می یابند. بخش های سیاه رنگ نشان دهنده سیگنال های در دسترس ورودی – خروجی می باشد که در بخش قبل به آن ها اشاره شد.
- ورودی سیگنال کنترل CV (ورودی معتبر)
- فشار ورودی محفظه P1 (ورودی معتبر)
- فشار خروجی محفظه P2 (ورودی معتبر)
- دما T (ورودی معتبر)
- جابجایی دبی خروجی X (خروجی)
- فلوی خروجی F (خروجی)
در شناسایی و عیب یابی سیستم نیازمند شناخت رابطه سیگنالی بین این مجموعه ورودی ها و خروجی ها می باشیم که به این منظور از شبکه عصبی در فرآیند عملکرد صحیح سیستم استفاده شده است.
از طرفی دیگر در بلوک دیاگرام نمایش داده شده مجموعه ای از عیوب می توانند رخ دهند که به 19 عیب تقسیم می شوند. این عیوب به صورت زیر می باشند:
عیبهاي شیرکنترلی ·
مسدود شدن شیر -F1
رسوب گذاري در شیر یا مقره آن -F2
خوردگی زبانه شیر یا مقره آن -F3
افزایش اصطکاك شیر -F4
نشت خارجی (نشت از قسمت بوش، روکش یا پایانه) -F5
نشت داخلی (کیپ شدن شیر) -F6
تبخیر مایع عبوري و جریان بحرانی -F7
عیبهاي سیستم سرو موتور ·
تاب برداشتن زبانه شیر -F8
کیپ شدن بدنه یا ترمینالهاي سرو موتور -F9
سوراخ شدن دیافراگم سرو موتور
عیب در فنر سیستم سرو موتور -F11
عیبهاي سیستم تعیین موقعیت ·
عیب در سیستم تبدیل الکترونیوماتیک -F12
عیب در سنسور جابجایی توپی شیر -F13
عیب در سنسور فشار -F14
عیب در فنر سیستم تعیین موقعیت -F15
عیبهاي عمومی یا خارجی ·
افت فشار سیستم تعیین موقعیت -F16
تغییر غیرمنتظره در فشار شیر -F17
باز بودن کلی یا جزئی شیرهاي بایپاس -F18
عیب در سنسور فلو-F19
با این توصیف می توان بلوک دیاگرام جعبه سیاه سیستم را بصورت زیر نمایش داد.

بلوک دیاگرام جعبه سیاه سیستم
این مدل به همراه کتابخانه آن در نرم افزار متلب و در محیط سیمولینک توسط مهندسین شرکت سازنده ارائه شده است که می توانید آن را از لینک دریافت کنید.
در گراف بعدی محل اعمال انواع عیوب سیستم نمایش داده شده است .

نحوه اعمال عیوب
با توجه به مطالعات و گراف های نمایش داده شده مشخص است که مدل سازی فضای حالت و یا بلوک دیاگرامی دقیق برای این سیستم امری سخت می باشد. از این رو در این پروژه به منظور شناسایی و عیب یابی سیستم از روش شبکه های عصبی استفاده شده است که در بخش بعد الگوریتم استفاده شده توضیح داده می شود.
بیان الگوریتم پروژه
به منظور شناسایی سیستم از الگوریتم شبکه عصبی(سیستم رو به جلو) استفاده شده است. در این مرحله با جمع آوری داده های خروجی از روی ورودی های معتبر عمل شده است. داده های ورودی معتبر باید :
- محدوده های مورد نظر را رعایت کنند.
- دارای خاصیت توزیع نرمال باشند.
- باعث اشباع خروجی های سیستم نشوند.
شکل زیر نمونه بلوک دیاگرام در سیمولینک متلب به منظور تولید داده فشار را نشان می دهد.

شماتیک تولید ورودی فشار ورودی محفظه
با انجام عملیات مورد نظر بلوک دیاگرام شبکه عصبی به منظور تولید داده های استاندارد و سالم (بدون عیب) برای شیر دامادیک را ارائه می دهد.
در مرحله بعد مسئله تعیین باقیمانده ها از روی روند سیستم می باشد. همانطور که می دانیم در بحث شناسایی و عیب یابی سیستم ، از باقیمانده ها به منظور تشخیص نوع عیب استفاده می شود. بلوک دیاگرام این مسئله در شکل زیر نمایش داده شده است.

ساختار پیشنهادی برای تشخیص عیب
در این ساختار مدل شناساگر همان مدل بدست آمده از شبکه عصبی می باشد. ورودی های یکسان به هر دو سیستم (سیستم واقعی شیر و سیستم شناسایی شده بوسیله شبکه عصبی) اعمال می شود. حال با اعمال عیب های مختلف (با شدت های متفاوت) به سیستم واقعی باقیمانده های مورد نظر در خروجی را بدست می آوریم.
نتایج شبیه سازی
به منظور شبیه سازی این پروژه پایان نامه و همانطور که قبلا بیان شده و لینک داده شد، پلنت سیستم به صورت یک پک کامل همراه با کتابخانه در اختیار ما قرار داده شده است و نیاز به مدل سازی این محرک نداریم. تنها بایستی کتابخانه این محرک به درستی به متلب افزوده شود و سپس شبیه سازی آن را انجام دهیم. به منظور افزودن کتابخانه به متلب در بخش آموزش متلب خواهیم گفت.
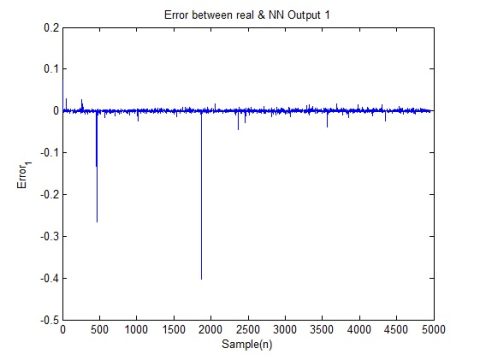
در مرحله بعد نتایج شناسایی سیستم بدست می آید. این نتایج برای دو داده خروجی فلو و جابجایی به صورت زیر می باشند.

نتیجه خطای خروجی اول برای شبکه عصبی و داده سیستم

نتیجه خطای خروجی دوم برای شبکه عصبی و داده سیستم
همانطور که نتایج بدست آمده نشان می دهد، خطای مقادیر شناسایی شده در حد پایین بوده و نتایج کار به لحاظ شناسایی سیستم قابل قبول می باشند.
پس از بدست آوردن باقیمانده ها و نهایتا شبکه عصبی نهایی نسبت به عیب یابی سیستم اقدام می شود که نمونه آن در شکل زیر نمایش داده شده است. در این شکل عیب در خروجی شبکه عصبی فعال شده است که نشان دهنده بروز عیب در سیستم شناسایی و عیب یابی سیستم می باشد.

شکل موج اندیس وقوع عیب در سیستم
در لحظه 60 از شبیه سازی بروز عیب در خروجی شبکه عصبی گزارش می شود. این مسئله با گذشت زمان تغییر نکرده و در سیستم گزارش عیب بصورت قطعی می باشد.
منبع : برق تِک
برای بررسی سایر نمونه کارها در زمینه شبکه های عصبی می توانید ببینید :